
Astromòbil

Un astromòbil (rover, en anglès) és un vehicle d'exploració espacial dissenyat per moure's a través de la superfície d'un planeta o d'un altre cos celeste. Alguns astromòbils han estat dissenyats per a transportar tripulants d'un vol espacial; altres han estat parcial o completament robots autònoms. Els astromòbils solen arribar a la superfície d'un objecte astronòmic a bord d'una nau espacial tipus lander (mòdul de descens).
Característiques
[modifica]
Els astromòbils arriben en naus espacials i s'usen en condicions molt diferents de les que hi ha a la Terra, el que exigeix alguns aspectes en el seu disseny.
Fiabilitat
[modifica]Els astromòbils han de suportar alts nivells d'acceleració, altes i baixes temperatures, la pressió, la sorra, la corrosió, els raigs còsmics, operant en bon estat sense reparacions durant un període necessari de temps.
Compacitat
[modifica]Els astromòbils solen estar doblegats durant la seva estada a la nau espacial, ja que aquesta té una capacitat limitada. A més a més s'instal·len dispositius per retirar les connexions que els subjecten a la nau.
Autonomia
[modifica]Els astromòbils Lunokhod 1 i Lunokhod 2 tenien "telecomandament",[1] en canvi, els astromòbils que aterren en cossos celestes llunyans de la Terra - tal com els astromòbils exploradors del planeta Mart - no poden ser controlats remotament en temps real perquè la velocitat en què els senyals de ràdio viatgen són massa lentes per aconseguir comunicacions d'aquest tipus. Aquests robots són capaços d'operar de manera autònoma amb una petita ajuda del control de terra.
Història
[modifica]Lunokhod 1
[modifica]L'astromòbil Lunokhod 1 va allunar el novembre de 1970.[2] Va ser el primer robot a control remot errant en aterrar en un cos celeste. La Unió Soviètica va llançar el Lunokhod 1 a bord de la nau Lluna 17 el 10 de novembre de 1970, i va entrar en òrbita lunar el 15 de novembre. La nau va allunar suaument a la regió Mare Imbrium el 17 de novembre. El mòdul de descens tenia rampes dobles des de les quals el Lunokhod 1 podia descendir a la superfície lunar, cosa que va fer a les 06:28 UT. Des del 17 de novembre de 1970 fins al 22 de novembre de 1970 l'astromòbil ha percorregut 197 metres, i durant 10 sessions de comunicació va tornar 14 primers plans de la Lluna i 12 vistes panoràmiques. A més va analitzar la pols lunar. L'última sessió de comunicació amb el Lunokhod 1 que va tenir èxit va ser el 14 de setembre de 1971. Havent treballat durant 11 mesos,[3] el Lunokhod 1 va mantenir el rècord de permanència per als astromòbils durant més de 30 anys, fins que es va registrar un nou rècord pels Mars Exploration Rovers.
Vehicle lunar tot terreny Apollo
[modifica]
La NASA va incloure els vehicles lunars tot terreny Apollo en tres missions: l'Apollo 15 (que va allunar el 30 de juliol de 1971), l'Apollo 16 (que va allunar el 21 d'abril de 1972) i l'Apollo 17 (que va allunar l'11 de desembre de 1972).[4]
Lunokhod 2
[modifica]
El Lunokhod 2 va ser el segon dels dos astromòbils autònoms enviats per la Unió Soviètica que van allunar com a part del programa Lunokhod. El astromòbil va quedar en estat operatiu a la Lluna el 16 de gener de 1973. Va ser el segon astromòbil robòtic a control remot en arribar a un cos celeste. La Unió Soviètica va llançar el Lunokhod 2 a bord de la nau espacial Lluna 21 el 3 de gener de 1973, i va entrar en òrbita lunar el 12 de gener. La nau va allunar suaument a la vora est de la regió Mare Serenitatis el 15 de gener. El Lunokhod 2 va baixar de les rampes del mòdul de descens a la superfície lunar a les 01:14 UT del 16 de gener.[5] El Lunokhod 2 va operar durant uns 4 mesos, cobrint 37 km de terreny enviant de tornada 86 imatges panoràmiques i més de 80.000 imatges de televisió. També va analitzar la pols lunar.
Astromòbil Prop-M
[modifica]La sonda soviètica Mars 3 (1971) tenia un astromòbil de 4,5 kg a bord, el qual es mouria per la superfície sobre esquís mentre es mantindria connectat al mòdul de descens amb un cable de 15 metres. S'usaven dues petites vares metàl·liques perquè pogués esquivar obstacles autònomament, ja que els senyals de ràdio de la Terra triguen molt de temps a arribar per poder manejar els astromòbils en temps real mitjançant telecomandament. Es va planejar que l'astromòbil estaria sota la superfície gràcies a un braç manipulador, es mouria en el camp de visió de les càmeres de televisió i deixaria de fer mesuraments cada 1,5 metres. Els rastres de moviment al sòl marcià serien gravats per determinar les propietats dels materials. Per desaparició del mòdul de descens, l'astromòbil mai va entrar en acció.[6]
Lunokhod 3
[modifica]L'astromòbil soviètic Lunokhod 3 (construït però no llençat) estava destinat a ser tercer astromòbil-robot a control remot a la Lluna el 1977. La missió va ser cancel·lada per la manca de finançament i disponibilitat de llançament.[7]
Marsokhod
[modifica]El Marsokhod era un pesant astromòbil soviètic (híbrid, a control remot i automàtic) destinat a Mart, part del projecte Mars 4NM previst per ser llançat (després de 1973 segons els plans de 1970) a bord d'un coet N1, que mai no va arribar a volar amb èxit[8]
Sojourner
[modifica]
La missió Mars Pathfinder incloïa el rover Sojourner, primer astromòbil a assolir amb èxit un altre planeta. La NASA va llançar el Mars PathFinder el 12 d'abril de 1996 i va aterrar a Mart en una regió anomenada Chryse Planitia el 7 de març de 1997.[9] Des del seu aterratge fins a l'última transmissió de dades el 27 de setembre de 1997, el Mars Pathfinder va enviar 16.500 imatges del mòdul de descens i 550 imatges del Sojourner, així com dades de més de 15 anàlisis químiques de les roques i rastres i informació molt àmplia sobre vents i altres factors climàtics.[9]
Missions actives d'astromòbils
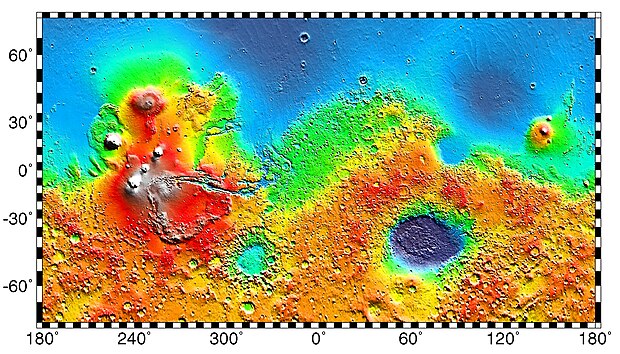
[modifica]El següent mapa d'imatge del planeta Mart conté enllaços interns a característiques areogràfiques destacant les ubicacions de «rovers» i mòduls de descens. Feu clic en les característiques i us enllaçarà a les pàgines dels articles corresponents. El nord està a la part superior; les elevacions: vermell (més alt), groc (zero), blau (més baix).
Mars Exploration Rover
[modifica]
Dos astromòbils, l'Spirit i l'Opportunity, van aterritzar a Mart com a part de la missió Mars Exploration Rover. Ambdós astromòbils han estat operant en Mart des de gener de 2004. L'agost de 2011, l'Opportunity havia travessat 15 quilòmetres de la superfície marciana.[10]
Mars Science Laboratory
[modifica]
El Mars Science Laboratory («Laboratori de Ciència de Mart») és un astromòbil de la NASA, el qual va ser llançat el 26 de novembre de 2011.[11] L'astromòbil MSL és més de cinc vegades més pesant i porta més de deu vegades el pes dels instruments científics d'un dels Mars Exploration Rovers.[12]
Futures missions
[modifica]Astromòbil ExoMars
[modifica]
Actualment, l'Agència Espacial Europea (ESA) està dissenyant i duent a terme el prototipatge inicial i les proves de l'astromòbil ExoMars, el llançament del qual està programat per a 2018.[13]
Chang'e-3
[modifica]El Chang'e-3 és un astromòbil lunar xinès el llançament del qual està programat per al 2013. Serà el primer astromòbil lunar de la Xina, part de la segona fase del Programa xinès d'exploració lunar emprès per l'Administració Espacial Nacional de la Xina (CNSA).[14]
Chandrayaan II
[modifica]Rússia i Índia uneixen esforços per a la construcció del Chanddrayaan II, programat per a 2014, el qual consisteix en un orbitador a la Lluna i un mòdul de descens lunar. Aquest astromòbil ha estat dissenyat per estudiants; 150 estudiants van enviar els seus dissenys però només 6 van ser seleccionats. Van fer una demostració a la NRSA i van a anar a l'«Indian Space Research Organisation» (ISRO). L'astromòbil rus dissenyat pesa 50 kg, tindrà sis rodes i funcionarà amb energia solar. Aquest s'allunarà prop d'un dels pols i operarà durant un any, recorrent fins a 150 km a una velocitat màxima de 360 m/h.[15]
Futures missions lunars de la NASA
[modifica]Els plans de la NASA exigeixen astromòbils que tinguin un abast més gran que els de l'Apollo.
Referències
[modifica]- ↑ «Luna - Exploring the Moon» (en anglès). www.zarya.info. Arxivat de l'original el 2011-05-15. [Consulta: 26 novembre 2011].
- ↑ «Lunar Lost & Found: The Search for Old Spacecraft» (en anglès). www.space.com. [Consulta: 26 novembre 2011].
- ↑ «Luna 17 and Lunokhod 1» (en anglès). www.zarya.info. Arxivat de l'original el 2011-05-15. [Consulta: 26 novembre 2011].
- ↑ «Experiment: Lunar Rover Vehicle» (en anglès). Ares.jsc.nasa.gov. Arxivat de l'original el 2009-03-20. [Consulta: 26 novembre 2011].
- ↑ «Luna 21 and Lunokhod 2» (en anglès). www.zarya.info. Arxivat de l'original el 2019-03-29. [Consulta: 26 novembre 2011].
- ↑ Flora Buxò. «El planeta Mart a través de la història» (pdf). [Consulta: 26 novembre 2011].[Enllaç no actiu]
- ↑ Andrew Chaikin. «The Other Moon Landings» (en anglès). Air & Space, 01-03-2004. Arxivat de l'original el 2013-12-15. [Consulta: 5 agost 2012].
- ↑ Советский грунт с Марса (rus)
- ↑ 9,0 9,1 «Mars Pathfinder» (en anglès). NASA. Arxivat de l'original el 2015-06-23. [Consulta: 26 novembre 2011].
- ↑ NASA's Opportunity Tops 20 Miles of Mars Driving - Jet Propulsion Laboratory (anglès)
- ↑ «Mars Science Laboratory Launch Milestones» (en anglès). NASA. Arxivat de l'original el 2011-11-26. [Consulta: 26 novembre 2011].
- ↑ «Troubles parallel ambitions in NASA Mars project» (en anglès). USA Today, 14-04-2008 [Consulta: 27 març 2009].
- ↑ «ExoMars Rover ESA Portal» (en anglès). ESA.
- ↑ «La Xina podria enviar la seva primera missió tripulada a la Lluna abans del 2030». europapress.cat, 24-05-2009. [Consulta: 26 novembre 2011].
- ↑ «Chandrayaan-2 launch delayed by 2014» (en anglès). Chennai, Índia: The Hindu, 05-07-2009. Arxivat de l'original el 2011-11-17. [Consulta: 26 novembre 2011].